
Паллетизатор

Паллетизатор

Паллетизатор
Чжэнчжоу Sincola Machinery Co., Ltd.. Завод по производству паллетайзеров ![]()




Паллетизатор
Паллетизатор
Паллетизатор
Модель:СДБ-400МД
Эффективность паллетирования: 400 раз/ч
Максимальная загрузка: 100кг
Максимальный радиус активности: 1950мм
Повторите точность позиционирования:+0.3мм
Рабочий диапазон:
ось S: земля 180 °
ось Z: 1800мм
Ось R: земля 180 °
Таксис: земля 360 °
Применимые продукты: сумка, коробка, блокировать, картон, деревянная доска, и т. д..
Источник питания: 3*AC380+Н
Высота паллетирования: 1600мм (другие размеры могут быть настроены)
Источник воздуха: 0.4-0.6МПа
Масса: 1500кг
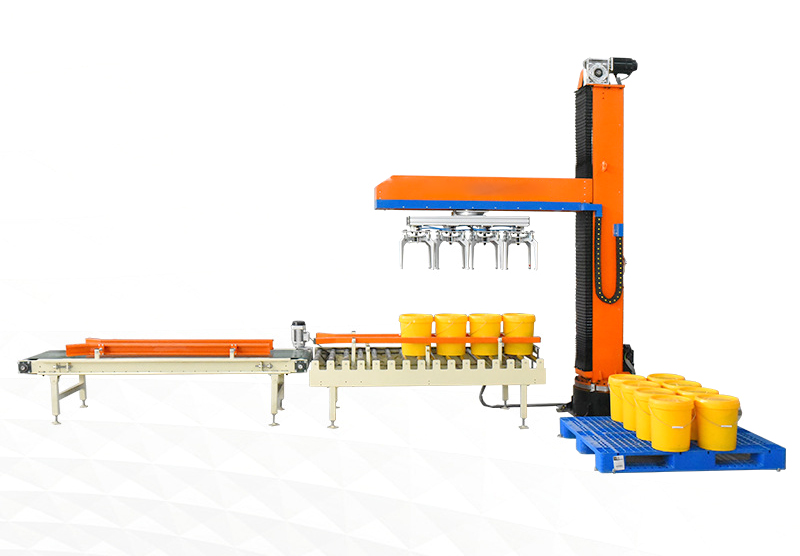
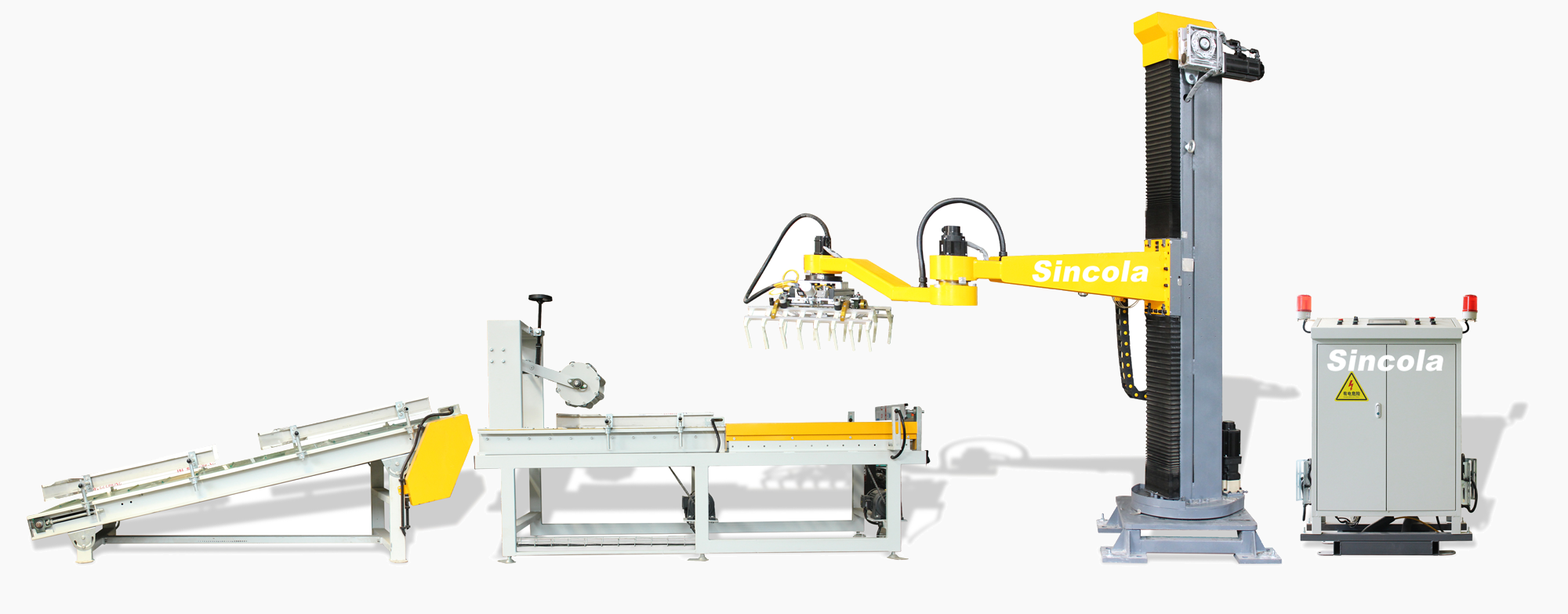
Паллетизатор прямой руки в колонке принимает систему управления роботами для достижения линейной интерполяции от точки в точку, делая движения плавными и плавными.
Подвесной пульт обучения контролирует движение промышленного робота с помощью ключевых функций управления и отображения., позволяя операторам плавно обучать и контролировать движение позиционера.
Схема штабелирования может быть предварительно сохранена и гибко использована для последующих дополнений..
Он может заполнить колонку Прямого поддона из продуктов в мешках в соответствии с необходимым методом группировки и слоями во время работы.
Упакованные паллетизатор с колонкой.. Колонной робот, за счет координации каждой оси, перемещает приспособление непосредственно над положением материала.
Когда отправляется сигнал позиционирования материала, приспособление движется вниз (Движение вниз по оси Z) управляемый серводвигателем.
Когда приспособление достигнет высоты удержания материала, ось Z перестает опускаться, приспособление открывается и захватывает материал.
Серводвигатель оси Z реверсирует, подъем приспособления на безопасную высоту и транспортировка материала в позицию паллетирования по заданной клиентом программе.
Ось Z опускается, размещение материала в назначенной точке. В этот момент, приспособление открывается, размещение материала в заданном положении. После завершения всего процесса паллетирования, звучит сигнал, указывающий на завершение. Затем вилочный погрузчик снимает поддон и ставит его на новый., готов к повторению процесса.




